|
|
うおおおおおっ!
投稿者:零句
投稿日:2005年08月13日
ホームページ
うわ、なんか・・・なんてコメント数だ(感激
◇WhiteOwlさん
>足を引きずる
最初に作ったときは見事に引きずってましたね。
脚の付け根の角度を工夫して、足の設置面がダブらないようにしたら、滑らかに動きました。
もう感動して、何度再生したことか(笑
◇BlueFoxさん
>六脚ロボットの歩行ムービー
ありがとうございます。
しっかり見させていただきました。
数回見て理解できなかったので、もっと研究してみます。
きっと虫みたいな歩行だろうとは思いますが・・・(汗
◇sin16さん
>一度進行方向に向き変えてから〜
全くそのとおりです。
おかげで、ロボットみたいな歩行というより動物的な歩行な感じになってしまいましたが・・・
この歩き方(?)だと90度旋回もできちゃうので、小回りは良いです。
◇ゴッシーさん
>シンプルながら、間接の作り〜
ありがとうございます。
作りはじめから歩かせようと考えていたので、
斜め四方向の脚のままで歩かせようとすると、無理が出てきちゃうんじゃ?
と思いこのような間接にしてみました。
◇かまた ゆたかさん
まさかかまたさんからコメントがもらえようとはっ!
もう感激です。
>やはり、ロボットは静止画だけでは寂しいです。
動かせてこそ、ロボットだと思います。
とにかく、こんなにコメントをもらえるとは思いませんでした(汗
皆様、ありがとうございます。
動画時代
投稿者:かまた ゆたか
投稿日:2005年08月12日
多脚砲台祭もいよいよ
動画の時代になって
きましたね。
やはり、ロボットは
静止画だけでは寂しい
です。
おおっ!零句さんの動画だ!
投稿者:ゴッシー
投稿日:2005年08月12日
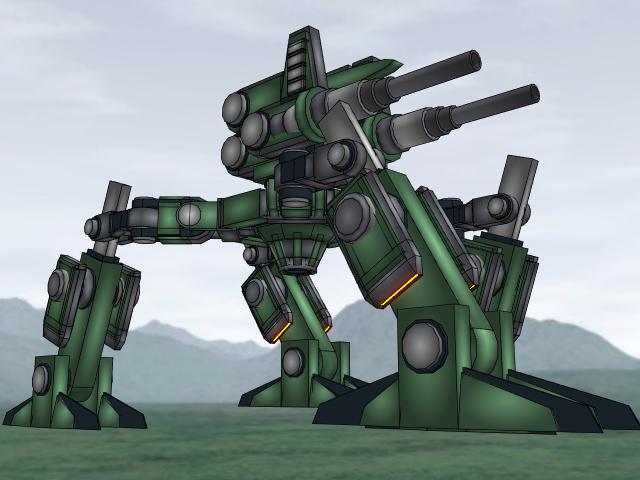
多脚を歩かせるのは本当に難しいと思います。
参考にする物が少ない、また想像しにくい等が私の理由ですが、いやぁ自然に歩いていますね!
動きが滑らか!そしてシンプルながら間接の作りが特にいいと思います。
歩いた歩いた♪
投稿者:sin16
投稿日:2005年08月12日
ホームページ
足の関節機構が一軸方向にしか動かないから、クモのように横に動かすのではなく、一度進行方向に向き変えてからの歩行になるんですね。
やっぱり、動くためにデザインされたロボット達なので、動きを見ると楽しいです。
参考になれば…
投稿者:BlueFox
投稿日:2005年08月12日
ホームページ
はじめまして,BlueFoxと申します.
いつも作品楽しく拝見させて頂いております.
先日,工業系のイベントへ行く機会があったのですが
そこでデモされてた六脚ロボットの歩行ムービーです↓
http://www.gem.hi-ho.ne.jp/h-kouzuki/6.3g2
(大阪大学)
多脚ブームの中,脚数の違いはありますが少しでも
参考になれば,と(汗;
では,失礼致しました.これからもいろんな作品
楽しみにしております.
|